- Record: found
- Abstract: found
- Article: found
A multi-dimensional framework for prosthetic embodiment: a perspective for translational research
Read this article at
Abstract
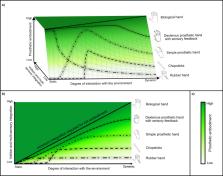
The concept of embodiment has gained widespread popularity within prosthetics research. Embodiment has been claimed to be an indicator of the efficacy of sensory feedback and control strategies. Moreover, it has even been claimed to be necessary for prosthesis acceptance, albeit unfoundedly. Despite the popularity of the term, an actual consensus on how prosthetic embodiment should be used in an experimental framework has yet to be reached. The lack of consensus is in part due to terminological ambiguity and the lack of an exact definition of prosthetic embodiment itself. In a review published parallel to this article, we summarized the definitions of embodiment used in prosthetics literature and concluded that treating prosthetic embodiment as a combination of ownership and agency allows for embodiment to be quantified, and thus useful in translational research. Here, we review the potential mechanisms that give rise to ownership and agency considering temporal, spatial, and anatomical constraints. We then use this to propose a multi-dimensional framework where prosthetic embodiment arises within a spectrum dependent on the integration of volition and multi-sensory information as demanded by the degree of interaction with the environment. This framework allows for the different experimental paradigms on sensory feedback and prosthetic control to be placed in a common perspective. By considering that embodiment lays along a spectrum tied to the interactions with the environment, one can conclude that the embodiment of prosthetic devices should be assessed while operating in environments as close to daily life as possible for it to become relevant.
Related collections
Most cited references112
- Record: found
- Abstract: not found
- Article: not found
Rubber hands 'feel' touch that eyes see.
- Record: found
- Abstract: found
- Article: not found
Touching a rubber hand: feeling of body ownership is associated with activity in multisensory brain areas.
- Record: found
- Abstract: found
- Article: not found