- Record: found
- Abstract: found
- Article: found
Design of Enhanced Rotation Locked Loop for Roll Angle Estimation of Rotating Vehicle in a Weak GPS Signal Environment
Read this article at
Abstract
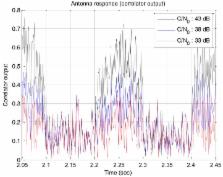
In order to estimate the roll angle of a rotating vehicle, an enhanced rotation locked loop (RLL) algorithm is proposed in this paper. The RLL algorithm estimates the roll angle by using the property that the power of the GPS signal measured at the receiver of a rotating vehicle changes periodically. However, in case the received GPS power is decreased, the performance of the conventional RLL algorithm degrades, or it cannot estimate the roll angle anymore, therefore, for operating the RLL algorithm in a weak signal environment, this paper designs a method to increase the signal-to-noise ratio (SNR) by overlapping multiple GPS signals’ correlator outputs and a method to compensate the decreased response of a rotation discriminator at low-signal strength. Through computer simulations, the performance of the proposed algorithm is verified and it is shown that the roll angle can be estimated stably even at a weak signal environment down to 29 dB–Hz of C/N0.
Related collections
Most cited references9
- Record: found
- Abstract: not found
- Article: not found
Spinning Vehicle Navigation Using Apparent Modulation of Navigation Signals
- Record: found
- Abstract: not found
- Article: not found