- Record: found
- Abstract: found
- Article: found
Error Overboundings of KF-Based IMU/GNSS Integrated System Against IMU Faults
Read this article at
Abstract
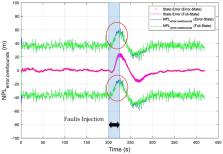
Considering the inertial measurement unit (IMU) faults risk of an unmanned aerial vehicle (UAV), this paper studies the error overboundings of the state estimation of the extended Kalman filter (EKF) in a tightly coupled IMU/global navigation satellite system (GNSS) integrated architecture under the IMU fault condition, which can be used to assure the integrity of the UAV navigation system. The error overboundings of the error-state inertial navigation equations based EKF (error-state EKF) are obtained according to the IMU faults propagation derivation, which can be expressed as a sum of the terms related to the EKF innovation, the estimated bias, and the remaining position error. It presents the same expression with the error overbounding of the full-state inertial navigation equations based EKF (full-state EKF). Simulation results show that both the error overboundings of the error-state and full-state EKFs can fit the state error against the IMU faults, but the error-state EKF is more suitable for UAV navigation system integrity assurance due to its higher calculation efficiency. This study will be extended to the integrity monitoring of multisensor systems.
Related collections
Most cited references14
- Record: found
- Abstract: not found
- Article: not found
Noise in MEMS
- Record: found
- Abstract: not found
- Article: not found
Flight Security and Safety of Drones in Airborne Fog Computing Systems
- Record: found
- Abstract: not found
- Article: not found