- Record: found
- Abstract: found
- Article: found
A brittle star-like robot capable of immediately adapting to unexpected physical damage
Read this article at
Abstract
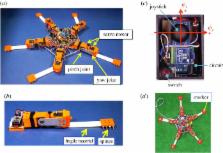
A major challenge in robotic design is enabling robots to immediately adapt to unexpected physical damage. However, conventional robots require considerable time (more than several tens of seconds) for adaptation because the process entails high computational costs. To overcome this problem, we focus on a brittle star—a primitive creature with expendable body parts. Brittle stars, most of which have five flexible arms, occasionally lose some of them and promptly coordinate the remaining arms to escape from predators. We adopted a synthetic approach to elucidate the essential mechanism underlying this resilient locomotion. Specifically, based on behavioural experiments involving brittle stars whose arms were amputated in various ways, we inferred the decentralized control mechanism that self-coordinates the arm motions by constructing a simple mathematical model. We implemented this mechanism in a brittle star-like robot and demonstrated that it adapts to unexpected physical damage within a few seconds by automatically coordinating its undamaged arms similar to brittle stars. Through the above-mentioned process, we found that physical interaction between arms plays an essential role for the resilient inter-arm coordination of brittle stars. This finding will help develop resilient robots that can work in inhospitable environments. Further, it provides insights into the essential mechanism of resilient coordinated motions characteristic of animal locomotion.
Related collections
Most cited references32
- Record: found
- Abstract: found
- Article: not found
Self-organization, embodiment, and biologically inspired robotics.
- Record: found
- Abstract: found
- Article: not found
Resilient machines through continuous self-modeling.
- Record: found
- Abstract: found
- Article: not found